







- Productoverzicht
- Delta Frequentieregelaars
Delta Frequentieregelaars
Bekijk aanbodOntdek ons gevarieerde aanbod aan Delta frequentieregelaars, ontworpen om te voldoen aan een breed scala van toepassingen. Van eenvoudige standaard aandrijving tot regelaars voor een specifieke applicatie. Ons assortiment biedt de perfecte balans tussen prijs en prestatie. Of je nu op zoek bent naar betrouwbare oplossingen voor industriële automatisering of specifieke technische behoeften hebt, wij bieden een divers aanbod met de optimale verhouding tussen kwaliteit en kosteneffectiviteit.


- Vermogen (KW): 0.75
- Fase: 3~400
- Stroom (Ampere): 3
- 130mm x 250mm x 170mm

- Vermogen (KW): 0.75
- Fase: 3~400
- Stroom (Ampere): 3
- 161mm x 366.4mm x 199mm

- Vermogen (KW): 0.75
- Fase: 3~400
- Stroom (Ampere): 3
- 161mm x 366.4mm x 199mm

- Vermogen (KW): 1.5
- Fase: 3~400
- Stroom (Ampere): 4
- 130mm x 250mm x 170mm

- Vermogen (KW): 1.5
- Fase: 3~400
- Stroom (Ampere): 4.2
- 161mm x 366.4mm x 199mm

- Vermogen (KW): 1.5
- Fase: 3~400
- Stroom (Ampere): 4.2
- 161mm x 366.4mm x 199mm

- Vermogen (KW): 2.2
- Fase: 3~400
- Stroom (Ampere): 6
- 130mm x 250mm x 170mm

- Vermogen (KW): 2.2
- Fase: 3~400
- Stroom (Ampere): 5.5
- 161mm x 366.4mm x 199mm

- Vermogen (KW): 2.2
- Fase: 3~400
- Stroom (Ampere): 5.5
- 161mm x 366.4mm x 199mm

- Vermogen (KW): 3.7
- Fase: 3~230
- Stroom (Ampere): 17
- 130mm x 250mm x 170mm

- Vermogen (KW): 3.7
- Fase: 3~400
- Stroom (Ampere): 9
- 130mm x 250mm x 170mm

- Vermogen (KW): 3.7
- Fase: 3~575
- Stroom (Ampere): 6.7
- 130mm x 250mm x 170mm
Meer over frequentieregelaars
- Soepele start en stop; door motoren geleidelijk te laten starten en stoppen verminder je mechanische schokken en vermindert de slijtage. Hierdoor verminder je de piekbelasting van het elektriciteitsnet bij met name de opstart.
- Variabele snelheidsregeling; je kunt de snelheid van een motor traploos aanpassen. Dit is vooral belangrijk bij toepassingen waar de motorsnelheid wordt afgestemd op veranderende omstandigheden.
- Energiebesparend; doordat de motor niet constant op volle snelheid draait, maar wordt afgestemd op de nodige belasting, kun je energie besparen.
- Verbeterde precisie; door nauwkeurige controle over de motorprestaties kun je processen optimaliseren en de productkwaliteit verbeteren.
- Overbelasting voorkomen; een frequentieregelaar kan met de juiste instellingen motoren beschermen tegen overbelasting en schade.
- Omkeren draairichting; Al onze frequentieregelaars kunnen de draairichting van de motor omkeren. Dat kan in bepaalde situaties handig zijn.
- PM aansturen; ze zijn ook geschikt voor het aansturen van permanent magneet motoren.
De frequentieregelaars uit de ME300 en MS300 series zijn compact en eenvoudig instelbaar. De regelaars hebben standaard een bedieningspaneel. De drives hebben een analoge ingang voor het aansluiten van een potmeter of een analoog signaal uit bijvoorbeeld een PLC.
In de drive staan 16 instelbare voorkeuzes ingesteld via 4 digitale ingangen. De regelaars kunnen worden aangestuurd met harde contacten, maar ook via een PLC uitgang (NPN of PNP), instelbaar via een dipswitch.
In sommige situaties bij het gebruiken en instellen van een frequentieregelaar heb je specialistische kennis nodig, dat is ons vakmanschap! We lichten dit toe in een artikel in het vakblad 'Aandrijven en Besturen" december 2025.
De IP-classificatie, “International protection”, is een nauwkeurige methode om de beschermingsgraden van omhulsels aan te gegeven. Deze IP classificatie geeft aan in hoeverre bijvoorbeeld een frequentieregelaar bestendig is tegen stof en water. Afhankelijk van de situatie waarin deze wordt gebruikt heb je een IP Klasse nodig die afdoende beschermt.
Hieronder de waardes op een rijtje:
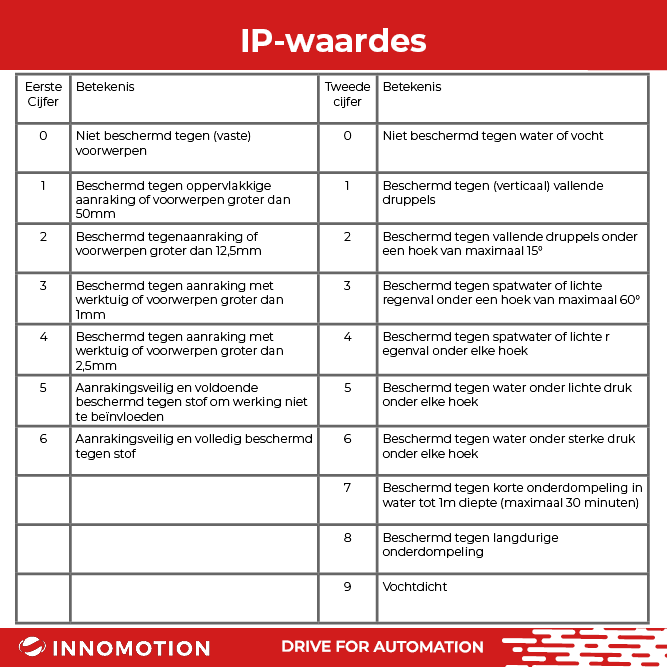
Wij kunnen frequentieregelaars leveren van IP20 tot en met IP66. Veel gebruikt voor pompen is de CFP serie met IP55 behuizing. Deze kan prima buiten een kast geïnstalleerd worden.
Wat is het 87Hz principe en wanneer pas je dit toe ?
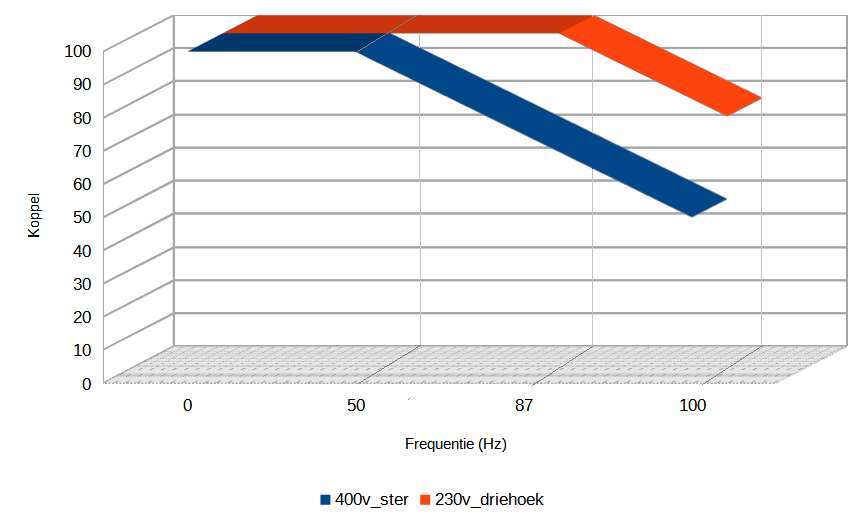
Het 87Hz principe (ook wel √3 principe genoemd) kan worden toegepast om bij een frequentie hoger dan de basisfrequentie van de motor het koppel op ‘peil’ te houden.
Een standaard draaistroommotor 50Hz/400V (in ster aangesloten) levert zijn nominale koppel tot 50Hz. Bij frequenties boven 50Hz neemt het koppel af.
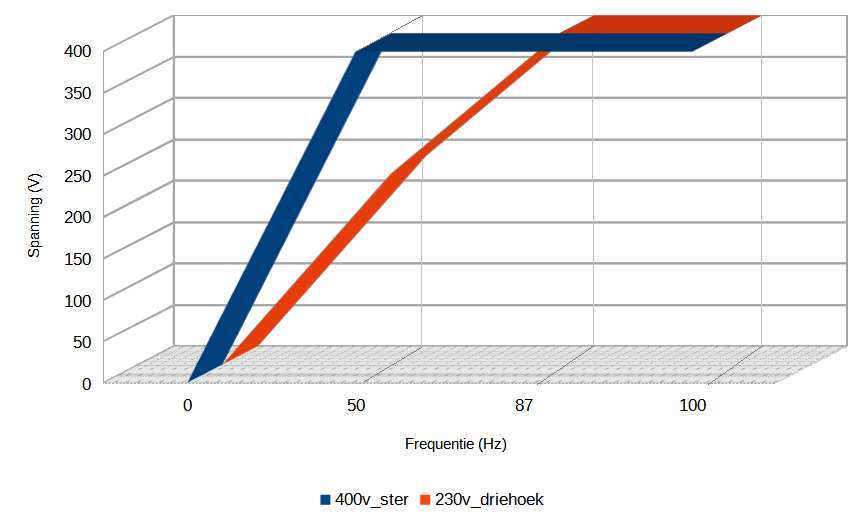
Tot een frequentie van 50Hz, worden de frequentie en de spanning geregeld, vanaf 50Hz wordt alleen de frequentie nog verhoogd en de spanning blijft 400V.
Als bij 50Hz een spanning van 400V wordt uitgestuurd, dan is bij 25Hz de uitgangsspanning 200V. De verhouding tussen spanning en frequentie is dan constant (400/50 = 8V/Hz en 200/25 = 8V/Hz).
Wordt de frequentie verder verhoogd naar bv. 80Hz, dan wordt, omdat de spanning niet verder wordt verhoogd, deze verhouding 400/80 = 5V/Hz.
Hierdoor gaat de motor in de zogenaamde veldverzwakkingsmodus en neemt het koppel omgekeerd evenredig af met de snelheid. Zo is bij een verdubbeling van het toerental (100Hz) het koppel de helft.
In veel gevallen is het lagere koppel niet zo’n probleem, maar soms is het van belang om bij frequenties boven de 50 Hz het nominale koppel te behouden. In dergelijke gevallen kun je het √3 principe toepassen.
Wat zijn de voorwaarden om dit principe toe te kunnen passen ?
Om een motor en frequentieregelaar op deze wijze te gebruiken, zijn er wel een aantal voorwaarden:
- De motor moet gewikkeld zijn voor 230V_driehoek/400V_ster en geschikt zijn voor 87Hz.
- De motor (en het daarop aangesloten werktuig) moet mechanisch geschikt zijn voor de hogere toerentallen. (Vrijwel altijd wordt hiervoor gebruik gemaakt van een 4-polige-1500 tpm motor.)
- Het gebruik boven de 50 Hz is voor kortere perioden.
- Vanwege extra verliezen in de motor is de thermische belasting hoger. Wij adviseren om de motor te bewaken op temperatuur, bijvoorbeeld met PTC’s. Afhankelijk van de toepassing kan het in bepaalde gevallen beter zijn de motor één of twee stappen groter te kiezen.
- De frequentieregelaar moet geschikt zijn voor de stroom bij driehoekaansluiting van de motor. Bijvoorbeeld bij een motor van 2,2kW moet de regelaar √3 x 2,2kW = 3,81kW = 4kW worden.
Hoe sluit je de motor aan ?
Door de motor in driehoek aan te sluiten en de frequentieregelaar anders in te stellen, kan de frequentie tot 87Hz worden opgevoerd terwijl toch vrijwel het nominale koppel geleverd kan worden.
Door het grotere regelbereik is de machine of het werktuig flexibeler. Een 4-polige motor met een nominaal toerental van bv. 1440 omw./min. bij 50 Hz, draait dan 2505 omw./min. bij 87 Hz.
Hoe wordt de frequentieregelaar ingesteld ?
De frequentieregelaar wordt zo ingesteld dat de verhouding tussen spanning en frequentie constant blijft tot een frequentie van 87 Hz.
Hiervoor wordt de basisfrequentie van de regelaar ingesteld op 87Hz. Dit houdt in dat de spanning van 400V wordt bereikt bij 87Hz. Hieruit volgt dat bij een frequentie van 50Hz, de spanning 230V is.
Met deze techniek wordt de frequentie en spanning geregeld over het hele bereik 0 – 87Hz. De verhouding tussen spanning en frequentie is over dit hele bereik constant en het koppel blijft dus ook constant tot 87Hz.
Parameters die ingesteld moeten worden:
| Parameter | Beschrijving | Fabrieksinstelling | Instelling voor 87Hz |
|---|---|---|---|
| 01-00 | Maximum Operation Frequency of Motor 1 | 50.00 Hz | 87.00 Hz* |
| 01-01 | Rated / Base Frequency of Motor 1 | 50.00 Hz | 87.00 Hz |
| 01-02 | Rated / Base Voltage of Motor 1 | 440.0V | 400V |
| 01-04 | Mid-Point Voltage of Motor 1 | 22.0V | 11.0V |
| 01-06 | Mid-Point Voltage 2 of Motor 1 | 10.0V | 5.0V |
| 01-08 | Minimum Output Voltage Voltage of Motor 1 | 2.0V | 1.0 V |
* Voorbeeldwaarde , voor de maximale frequentie kan een andere gewenste waarde worden ingevuld. | |||
Dit principe wordt meestal toegepast op 50Hz motoren, voor 60Hz motoren kan dit √3 principe ook gebruikt worden. Dan wordt de basisfrequentie ingesteld op 60 x √3 =104Hz.
Wanneer een frequentieregelaar in storing valt of een foutmelding op het display gooit, krijgt de drive vaak direct de schuld. “De regelaar is defect” hoor je dan als eerste. Maar eerlijk? In heel veel gevallen is dat niet waar.
Een frequentieregelaar heeft simpelweg een display en uitgebreide monitor-functies. Hij kan dus laten zien wat er misgaat in het systeem dat hij moet aansturen. Een motor heeft die luxe niet — die geeft geen foutcodes, alleen symptomen. Daardoor wordt in de praktijk nogal eens een perfecte regelaar vervangen, terwijl de echte boosdoener de motor is.
De B4GF-melding: bijna altijd een aardfout in de motor

Specifiek bij Delta-regelaars geldt: verschijnt er een B4GF-melding, ga er dan vanuit dat er een sluiting naar aarde in de motor zit. De drive ziet foutstromen die je zonder meting niet direct kunt herkennen.
Waarom gewoon weerstand meten niet genoeg is
Een standaard weerstandmeting lijkt soms oké, terwijl de motor wél problemen heeft. Dat komt doordat je bij zo’n meting geen hoge spanning op de wikkelingen zet. Een isolatiefout blijft dan verborgen.
De juiste manier: meggeren
Om zeker te weten dat het probleem niet in de kabel, maar in de motor zit, moet je de motor meggeren – isolatieweerstand meten met 500 of liefst 1000 volt.
Zo doe je dat goed:
- Koppel de motor los van de kabel
Haal de klemmen los én verwijder de overbruggingstrips. Je houdt zes afzonderlijke aansluitingen over. - Sluit de aarde van de megger aan op het motorhuis
Dit is je referentiepunt. - Meet per aansluitpunt naar aarde
Zet de meetpen per wikkeling op een van de zes pennen. Check de meting:
- De waarde moet > 1 MΩ zijn
- De testspanning moet netjes oplopen naar de ingestelde waarde (500 of 1000 V)
Is dat zo? Dan zit je goed. Blijft de spanning laag en zie je een lage weerstand of zelfs 0 Ω? Dan is er duidelijk een aardsluiting.
In onderstaande filmpje wordt het proces voorgedaan:
Als een frequentieregelaar een aardfout meldt, vertelt hij wat er echt aan de hand is. Door de motor te meggeren kun je met zekerheid vaststellen of de storing door de motor zelf komt. Zo voorkom je dat er onnodig regelaars worden vervangen, terwijl de motor eigenlijk het probleem is.